Людям досить легко визначити щільність ірельєфність предмета, просто глянувши на нього. З таким же успіхом можна сказати, як виглядає об'єкт, просто торкаючись його з закритими очима. Такі вміння допомогли б роботам краще взаємодіяти з предметами але, на жаль, до цих пір вони не були їм доступні. Дослідники з Лабораторії штучного інтелекту МТІ (CSAIL) вирішили цю проблему, оснастивши роботизовану руку KUKA тактильним датчиком GelSight - таким чином, штучний інтелект зміг вивчити зв'язок між візуальної і тактильної інформації, і об'єднати їх.

Використаний тактильний датчик GelSight буврозроблений групою інженерів під керівництвом Теда Адельсона в 2014 році. За своєю суттю він є електронною копією кінчика людського пальця, в якому для створення тривимірної карти поверхні використовується камера і чутлива гумова плівка. Пристрій вже не раз було перевірено в реальних умовах - наприклад, одного разу він допоміг роботу правильно підключити USB-кабель до порту.

Штучний інтелект об'єднав органи дотику і зору
У новому проекті датчик був встановлений в роботаKUKA, і об'єднаний з штучним інтелектом - таким чином роботизована рука навчилася на око визначати рельєфність предметів, і наосліп розпізнавати їх форму. Для навчання системи використовувався набір з 12 000 відеороликів з 200 об'єктами, такими як тканини, інструменти та побутові предмети. Відео було розбито по кадрам, і саме на їх основі робот об'єднував тактильну і візуальну інформацію.

На даний момент робот здатний виконувати роботутільки в контрольованому середовищі, і тільки з заздалегідь відомими йому предметами. Розробники системи хочуть розширити його можливості, давши штучного інтелекту більше даних для вивчення.
Дивлячись на сцену, наша модель може уявитисобі відчуття дотику до плоскої поверхні або до гострого краю. Торкаючись наосліп, вона може визначити форму предметів виключно по тактильним відчуттям. Об'єднання цих двох почуттів може розширити можливості робота і скоротити обсяг даних, які можуть йому знадобитися для виконання завдань, пов'язаних з маніпулюванням і захопленням об'єктів, - пояснив Юньчжи Лі, аспірант CSAIL.
Роботи постійно вдосконалюються, і на даниймомент навіть вміють працювати в команді. Наприклад, розроблені в Каліфорнійському університеті в Берклі роботи-таргани VelociRoACH недавно навчилися допомагати один одному вставати на ноги. Почитати про це і подивитися відео можна в нашому матеріалі.
Якщо вам цікаві новини науки і технологій, обов'язково підпишіться на наш канал в Яндекс.Дзен. Там ви знайдете матеріали, які не були опубліковані на сайті!
Related articles
 Вони нарешті зробили хорошу панорамну камеру
Вони нарешті зробили хорошу панорамну камеру- Недорогі електромобілі з'являться раніше, ніж ви думаєте
- У Китаї представили електрогіперкар GAC потужністю 1224 л. (10 фото)
- Redmi готує до випуску відразу два нові проектори
- Вчені навчилися передавати сигнал 5G та електроенергію
- Домашні вихованці допомагають дітям-аутистам розвинути впевненість в собі
- На мишах випробували микророботов по доставці ліків в кишечник (2 фото + відео)
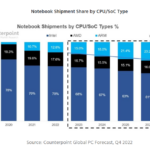
- Ноутбуки на базі процесорів ARM становитимуть до чверті продажів ноутбуків до 2027 року