Det er ret nemt for folk at bestemme densiteten oglindring af emnet, bare ved at se på det. Du kan lige så godt sige, hvad objektet ser ud, bare røre det med lukkede øjne. Sådanne færdigheder ville hjælpe robotter til at interagere bedre med objekter, men desværre var de indtil videre ikke tilgængelige for dem. Forskere fra MIT Artificial Intelligence Laboratory (CSAIL) løste dette problem ved at udstyre KUKA robotarm med en GelSight-taktilsensor - kunstig intelligens kunne således studere forbindelsen mellem visuel og taktil information og kombinere dem.

Brugt GelSight taktil sensor varudviklet af en gruppe ingeniører ledet af Ted Adelson i 2014. I sin kerne er det en elektronisk kopi af spidsen af en menneskelig finger, der bruger et kamera og en følsom gummifilm til at skabe et tredimensionelt kort over overfladen. Enheden er allerede blevet testet i reelle forhold mere end én gang - for eksempel, da det hjalp en robot til at tilslutte et USB-kabel korrekt til porten.

Kunstig intelligens har kombineret organer af berøring og vision.
I det nye projekt blev sensoren installeret i robotenKUKA, og kombineret med kunstig intelligens - på den måde har robotarmmen lært for øjnene at bestemme reliefen af objekter og blindt genkende deres form. Et sæt på 12.000 videoer med 200 genstande, såsom stoffer, værktøjer og husholdningsartikler, blev brugt til at træne systemet. Videoerne blev opdelt i rammer, og det var på deres grundlag, at roboten kombinerede taktile og visuelle oplysninger.

I øjeblikket er roboten i stand til at udføre arbejdekun i et kontrolleret miljø, og kun med genstande, der er kendt for ham på forhånd. Systemudviklere ønsker at udvide sine muligheder, hvilket giver kunstig intelligens flere data til at udforske.
Ser vi på scenen, kan vores model præsentereet strejf af en flad overflade eller en skarp kant. Ved at røre blindt, kan hun bestemme form af objekter udelukkende ved taktile fornemmelser. Kombinationen af disse to sanser kan udvide robotens evner og reducere mængden af data, som det kan have brug for for at fuldføre opgaver, der involverer manipulation og indfangning af objekter, "forklarede CSAIL-kandidatstuderende Yunzhu Li.
Roboter bliver konstant forbedret, og ved detteøjeblik selv ved, hvordan man arbejder i et hold. For eksempel lært roach-roaches VelociRoACH, udviklet ved University of California i Berkeley, for nylig at lære hinanden at stå på deres fødder. Du kan læse om det og se videoen i vores materiale.
Hvis du er interesseret i nyhederne om videnskab og teknologi, skal du sørge for at abonnere på vores kanal i Yandex. Dzen. Der vil du finde materialer, der ikke er blevet offentliggjort på hjemmesiden!
Relaterede artikler
 Endelig lavede de et godt panoramakamera.
Endelig lavede de et godt panoramakamera.- Billige EV'er kommer hurtigere end du tror
- Den elektriske GAC-hyperbil med en effekt på 1224 hk blev præsenteret i Kina. (10 billeder)
- Redmi forbereder sig på at frigive to nye projektorer på én gang
- Forskere har lært, hvordan man sender et 5G-signal og elektricitet
- Kæledyr hjælper autistiske børn med at udvikle selvtillid
- Microarbots ved levering af medikamenter til tarmen blev testet på mus (2 fotos + video)
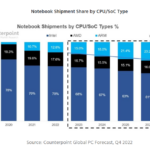
- ARM-baserede bærbare computere vil stå for op til en fjerdedel af salget af bærbare computere i 2027