ロボットを作るとき、エンジニアはしばしば霊感を受けます本物の動物 - 彼らはしばしば解剖学的特徴と化学生物学的特徴の両方を借りています。例えば、ジョージア工科大学の卒業生は、座りがちな生活様式のために最小限の食べ物とエネルギーで満足するナマケモノの驚くべき特徴に注目を集めました。小型のロボットを製作し、非常にゆっくりとし、動きのエネルギーを要求しないように彼に教えたので、彼らは彼をほとんど不滅にしました。

ロボットの開発は学生ジェンナロを巻き込んだマグナスエガステット教授の指導のもと、ノトミストとユセフエマム。彼らの主な目標は、最小限の動きを実行し、したがって非常に少量のエネルギーを消費するロボットを作成することでした。理想的には、効率を維持するために、十分な日中のエネルギーがあるべきです - 開発者は本当にそのような技術を作成することに成功しました。
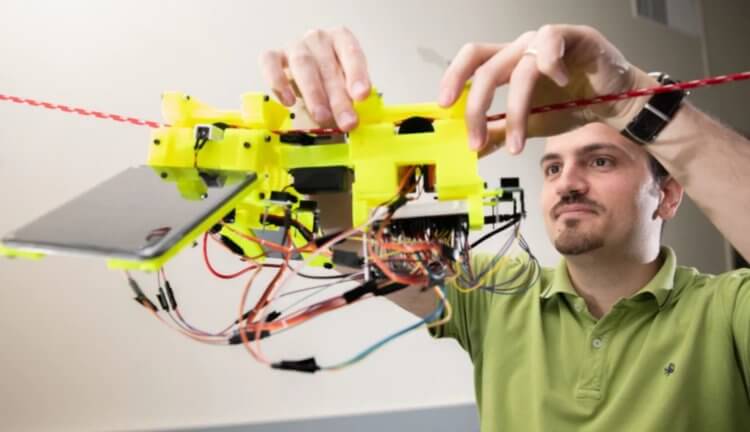
大量のエネルギーを供給するナマケモノロボット
主にロボットはから成っています3Dプリンタの歯車やその他の緊張したケーブルに構造を保持するように設計された部品。開発者によると、ロボットを森の木のてっぺんの間にぶら下げてケーブルに沿ってゆっくり動かせるようにすることで、野生生物の状態を数カ月間観察することができます。

ロボットは念のために動くだけなのでどうしても必要な、その電荷は非常に長い間十分なはずです。ピンチで、彼は常に充電状態にバッテリーを保つ太陽電池パネルを持っています。 Magnus Egerstedt教授によると、身体運動は脳や感覚器官の働きよりもはるかに多くのエネルギーを必要とします。ロボットの動きを最小限に抑えることで、彼らは最大限のバッテリー節約を達成することができました。
ロボットテスト
近い将来、ロボットはテストされるでしょうコスタリカのココア農園 - ケーブルを使ってココアを動かします。また、ロボットはアトランタの植物園でテストされ、そこで環境の状態が監視されます。試作品にはたくさんの突き出したワイヤーがあるため、これらのテストの前に、開発者は構造に堅牢なハウジングを装備する必要があります。

エンジニアは時々注意を払うだけではありません動物の特徴だけでなく、植物の行動にも。例えば、2019年初頭、ジェノバのイタリアの研究開発センターの研究者たちは、登山植物のようなものを登るロボットを作りました。この発明に関するより多くの情報は私達の資料で読むことができます。
私たちの電信チャットで科学技術のこれと他のニュースについて話し合ってください。そこにあなたはいつもあなたが興味のあるトピックについてチャットする誰かを見つけるでしょう!