Изпратен на 17 април тази година на бордаНа Международната космическа станция, компактните летящи роботи-кубове от проекта Astrobee започнаха да преминават полетните си тестове при условия на микрогравитация. Според авиокосмическата агенция на НАСА дебютният полет на робота „Бъмбъл“ при нулева гравитация се състоя на 14 юни 2019 година. Агенцията припомня, че на борда се намира и вторият робот, наречен “Honey”, а третият, Queen, се очаква да пристигне на ISS през юли тази година.

Основната задача на тази система е от комплекс от роботи.ще бъде да тестват работата си на борда на МКС, но в бъдеще НАСА обмисля използването на такива роботи за изпълнение на ежедневни рутинни задачи, които ще освободят екипажа на МКС от прости, но чести действия. В допълнение, тези машини могат да бъдат много полезни по време на мисии в дълбокия космос - Луната и Марс. Следователно, между другото, името на проекта Astrobee - "Astropchely".

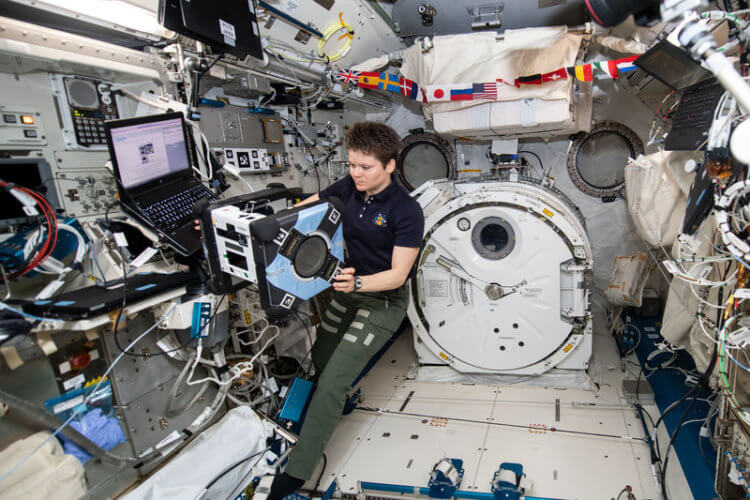
30 април 2019 г. Астронавтът на Ан Макклейн от НАСАРазопаковах кутията с робота „Бъмбъл“ и с подкрепата на екипа на НАСА „Астроби“, проверих всички спомагателни системи на робота - авиониката, видеокамерите, задвижващата система, както и предаването на данни и зареждането на батериите.


В средата на юни, в условията на микрогравитация, първите полетни тестове на робота „Бъмбъл“ преминаха на борда на Международната космическа агенция. Видеоклипът може да бъде видян по-долу.

Технически характеристики на роботите на проекта Астроби
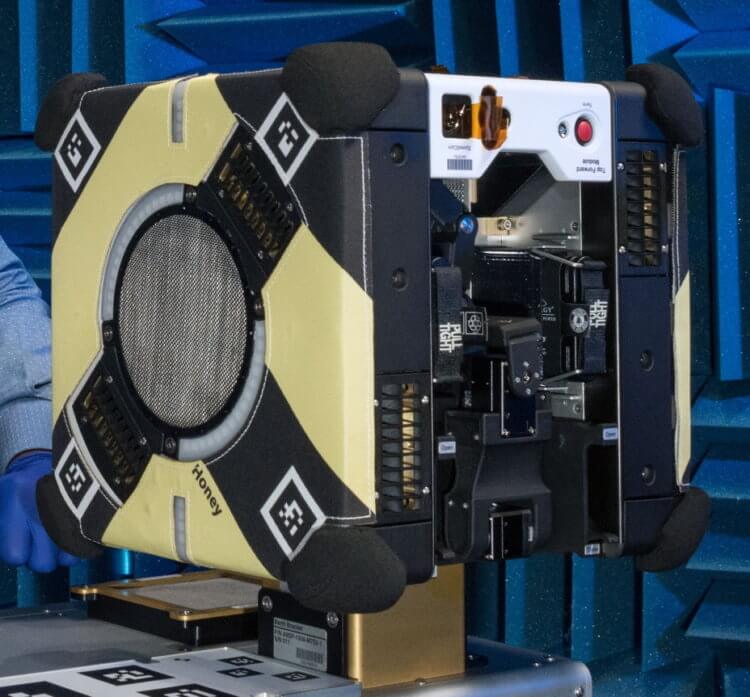
Разработени роботи експерти НАСА Ames изследователски център. Техническите характеристики на компактните робототехници са както следва:
- Размерът на всеки робот е 30x30x30 см;
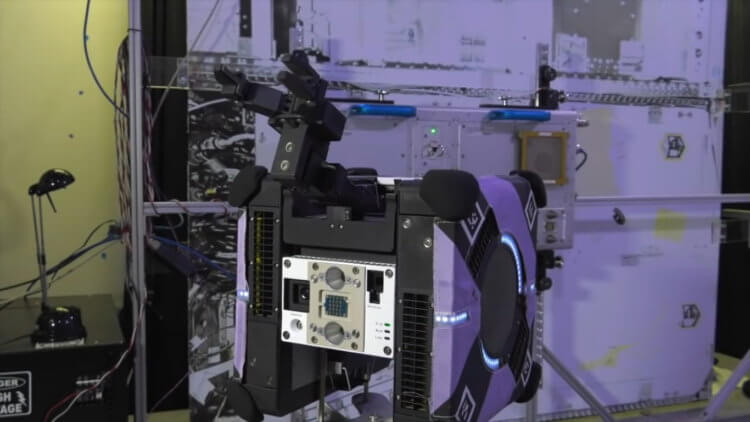
- Външната обвивка на корпуса е покрита с мек материал. Минимизира възможните щети, ако роботът удари всеки предмет или елемент на борда на МКС;
- Роботите са много гъвкави. Всяка от тях е оборудвана със система за захващане и фиксиране на обекти със сгъваем манипулатор, което ще ви позволи да улавяте и премествате обекти от единия край на станцията до другия. В допълнение, при едни и същи скоби, роботите могат да фиксират положението си, ако е необходимо, чрез закачане на перила или други елементи от вътрешността на станцията;
- За да ги заредите на МКС, е инсталирана специална докинг станция. Той също така служи за анализиране на получените телеметрични данни;
- Движението може да бъде само на МКС и само вмодули, където има атмосфера, тъй като тяхното движение в безтегловност се извършва благодарение на система от вентилатори (монтирани от всяка страна на куба), които улавят и изхвърлят въздух през 12 дюзи в противоположна посока на движение. Вътрешният компютър, инсталиран на всеки робот, отговаря за работата на тази система;
- Linux се използва като операционна система. Модулът, който отговаря на задачата за преместване на обекти вътре в станцията, е базиран на Android. Това ще позволи, ако е необходимо, бързо да се разшири функционалността на системата;
- Всеки робот е оборудван с: главна навигационна камера с поле на видимост 116 градуса, няколко HD камери с автофокус и възможност за предаване на информация на Земята в реално време, както и системата CamBoard Pico Flexx, която позволява на колата да разпознава обекти и препятствия от до четири метра;
- Може да работи както самостоятелно, така и с дистанционно управление.


Станция за зареждане на роботи
Функции и задачи на роботите Astrobee

- Помогнете на екипажа. Извършване на рутинни задачи, така че екипажът на МКС да се фокусира върху решаване на по-важни въпроси: провеждане на експерименти и различни научни изследвания;
- Инвентаризация, документиране на експерименти, наблюдение на работата на системите ISS, мониторинг на качеството на въздуха, движение на товара на борда на станцията;
- Поддръжка на модулите на МКС, когато в тях няма персонал или на места, където екипажът не може да достигне бързо;
Можете да обсъдите новините в нашия чат.
Свързани статии
 BQ 2825 Дискотека Бум - мобилна дискотека
BQ 2825 Дискотека Бум - мобилна дискотека- Asus представи голям флагмански смартфон Zenfone 11 Ultra с цена 1000 евро (5 снимки)
- After Effects, обучени за рязане на движещи се обекти (видео)
- ZTE пуска евтин смартфон Axon 30s с камера под екрана
- Xiaomi патенти мулти-слайдер екрани
- Страхотни камери и всичко останало: подробности за предстоящия флагман Vivo X100 Pro +
- Първите тестови състезания на летящи автомобили Alauda Aeronautics ще се проведат до края на 2021 г. (2 снимки + видео)
- Как да определим възрастта на кучето си в човешки план?